





LTB810现场动平衡仪

LTB810现场动平衡仪
LTB810现场动平衡仪可以快捷而精确的实现单双面动平衡校正。 系统构成: 一 体化便携式设计,由ARM9型电脑和振动处理专用采集板构成。
关键词:
所属分类:

全国热线:
产品描述

一.功能与技术指标
1.具有单面、双面平衡能力,可适合不同种类转子的现场平衡
2.向导式动平衡功能:软件根据测量数据快速解算出配重质量及其角度,提供了完善的向导式动平衡功能,操作者只要按向导进行就可以轻松完成动平衡校正。
3.可以从已保存的未完成动平衡过程继续进行动平衡
4.利用现场原有安装条件,开停机2~3次;
5.矢量分解:对解算出的平衡质量进行合理的矢量分解,以满足现场安装的客观要求。
6. 平衡方法:试重法和影响系数法;
7.试重估算:根据输入的转子资料自动估算出合理的动平衡试重质量,并可给出动平衡效果的结论。
8.平衡报表生成及输出;
9.转速测量范围:30~20000r/min,精度万分之一,分辨率:0.1转/分
10.一次平衡可使不平衡量减少80%以上
11.振动烈度精度5%12. 平衡等级,可以达到G2.5
二.硬件基本参数
操作系统:WINCE
存储容量:512M
液晶显示:3.5寸真彩液晶屏,640×480象素
触摸屏:全屏幕触摸操作
通讯:USB接口
电源:外接电源及锂电池供电,适用电池时工作时间大于6小时
工作温度范围:(-10~50)℃湿度:95% RH非冷凝
三.硬件采集板技术参数
振动采集通道数: LC830为单通道,LC830A为双通道,另外配置1个转速通道
各振动通道 绝 对 独立的信号处理,确保各通道信号的独立性,杜绝通道间干扰
硬件多通道同时采样保持,确保多通道振动信号的 绝 对 同相位。
硬件程控增益放大器,放大倍数1、2、4、8、16、32、64、128、256自动调节,有效地提高了信号的信噪比
硬件多重信号滤波,zui大限度的灵活的获得目标信号。
包括:低通滤波: 600Hz到15K分段可调
高通滤波: 0.1Hz、10Hz、400Hz、1KHz
抗混滤波: 硬件自动调节
硬件积分处理,可以获得振动加速度、速度、位移三种信号
高精度的AD转换器:14位A/D,300K
系统频率分析范围:0.1Hz—100KHz
电 源: 交/直流供电
振动参数:
仪器频响范围:0.1~ 15 KHz
测量范围:加速度 0.1~199.9m/s2(单峰值) (5~10KHz) 分辨率:0.01 m/s2
速 度 0.1~199.9mm/s(有效值) (5~1KHz) 分辨率:0.01 mm/s
位 移 0.001~1.999mm(峰峰值) (5~1KHz), 分辨率:0.01 um
振动分析与频谱分析
频谱种类:幅值谱
谱线数:400,800, 1600,3200
时域采样:1024, 2048, 4096, 8192
可自动计算1/2, 1,2,3倍频
四.设备操作
1.基本信息录入
先轻击单面动平衡按钮进入基本信息录入界面,此菜单为单面动平衡向导式操作,由此向导可完成动平衡整个过程。在此界面输入测量参数、转子转速、转子名称、转子编号、转子质量、配重半径、机组功率类型、平衡等级。由于这些信息将应用在动平衡过程中,并给出推荐试重等,所以请认真填写。
轻击“单面动平衡”按钮进入基本信息录入界面。填写转子的基本信息,点击需要输入框户自动弹出软键盘,如果需要切换输入法,点击屏幕右下角进行切换,填写完毕后再轻击空白处隐藏软件盘。基本信息填写完毕,进入下一步操作。
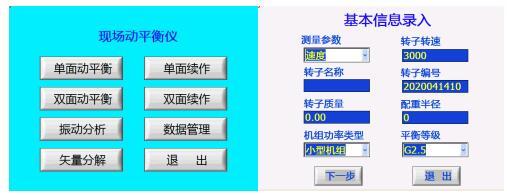
图:基本信息输入
转子转速为主要参数须填写,输入转子转速,其它参数可以不必填写。点击下一步按钮,进入初始振动测量界面。
2.初始振动测量
确保主机、传感器正确连接好后起机,按“开始”按钮开始测量,待测量值较稳定后(此时相位较稳定,变化不超过正负10度),先按“暂停”键暂停测量,并保持测量值;然后点击“保存”键保存测量数据(在暂停状态下才可进行数据保存),弹出初始数据以保存提示框,点击界面中“OK”按钮完成数据保存。
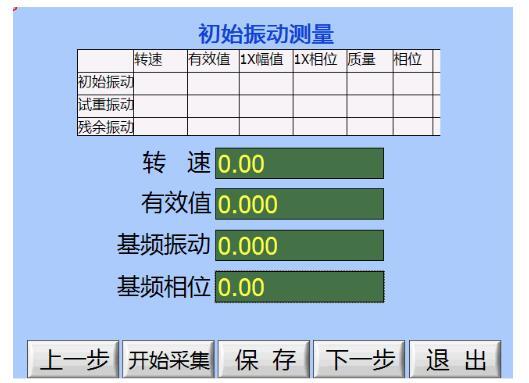
图:初始振动数据采集与保存
数据保存到数据库中后,按“下一步”进入输入试重界面。
3.输入试重
此时需要停机在转子上添加试重。如果在 第 一 步操作中转子基本信息填写完全,就可以根据输入试重界面中,给出的参考试重质量在转子上进行添加;如果转子基本信息未填写完全,软件则无法给出参考试重质量,此时检测人员只须根据转子大小及转速,选取相应的试重添加在转子上即可。添加试重完成后,根据实际试重质量在本界面的试重质量栏中填写。为了方便添加试重,默认所加试重的位置为零度角,如果被测机械有特殊要求,则在相应位置添加试重,并填写对应角度。

图:输入试重
试重质量及试重角度,填写完毕后。起机,待机械转速平稳后,点击“下一步”进入试重振动测量界面。
4.测量试重振动
当机械转速平稳后,且确保主机、传感器正确连接好后,按“开始”按钮开始测量试重振动,待测量值较稳定后(此时相位较稳定,变化不超过正负10度),先按“暂停”键暂停测量,并保持测量值;然后点击“保存”按钮保存测量数据(在暂停状态下才可进行数据保存),弹出试重振动数据以保存提示框,点击界面中“OK”按钮完成数据保存。
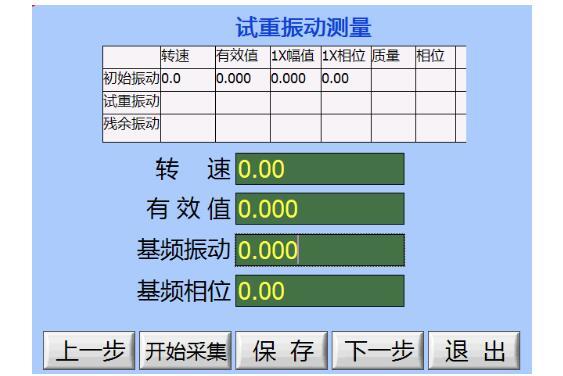
图:试重振动数据保存
从数据列表中查看,若基频振值以及相位的变化量超过20%,说明试重加的比较合理。否则说明试重加的不够好,需要停机加大试重的质量,点击“上一步”按钮返回输入试重界面,重新填写试重质量,再重新测量初始振动值并保存。数据保存完成后,点击“下一步”进入配重解算界面。
5.配重解算
根据软件提示的配重矢量,质量大小,角度,正确在转子上添加配重即可。试重位置位置为零度,角度范围:-180~+180度,顺着转子转动方向为正,逆着转子转动方向为负。
本软件还提供矢量分解功能(具体矢量分解步骤及操作方法参见“第四节矢量分解”),如果软件给出的配重质量或角度不容易在转子上添加,那么选择矢量分解。在矢量分解界面,
可以根据现场及转子的情况,以选择不同的分解方式,有等分配重、已知两分矢量质量求两分矢量角度、已知两分矢量角度求两分矢量质量、已知一分矢量求另一分矢量,四种方式供用户自行选择。下图以等分配重为例进行介绍。等分配重是在转子上去若干等份,在这些等分上添加配重。本例中转子被分为16等份,则在等分数量选项中选择16,再点击计算按钮,就可给出需要添加配重的质量及角度。

图:配重解算步骤
停机在给出的配重位置添加相应的配重块,添加配重后把试重取下(须把试重取下否则检测数据出错)。点击退出返回矢量分解界面,再点击“退出”返回配重解算界面,点击“下一步”进入残余振动测量界面,开启设备进行残余振动的检测。
6.残余振动测量
起机后待机械转速平稳,且确保主机、传感器正确连接好后,按“开始”按钮开始测量,待测量值较稳定后(此时相位较稳定,变化不超过正负10度),先按“暂停”键暂停测量,并保持测量值;然后按“保存”按钮保存测量数据(在暂停状态下才可进行数据保存),弹出残余振动数据已保存提示框,点击界面中“OK”按钮完成数据保存到数据库。
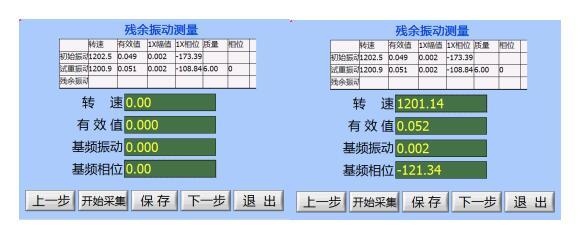
图:残余振动测量
从数据列表中可以看到,采集到的各振动值。数据保存完成后,点击“下一步”进入平衡结果界面。
7.平衡结果
在残余振动测量界面中轻击“下一步”按钮,进入平衡结果界面。如以达到机械的振动
要求,则点击“退出”按钮完成机械动平衡;如未达到机械的振动要求,则需要停机根据软件给出的,二次平衡配重在转子上添加二次配重(具体矢量分解步骤及操作方法参见“第四节矢量分解”),然后起机待机械转速平稳后进行二次平衡的测量。

图:平衡结果
点击“二次平衡”按钮进入二次平衡界面进行二次平衡的测量。
8.二次平衡振动测量
添加二次配重完成后起机,待机械转速平稳,且确保主机、传感器正确连接好后,按“开始”按钮开始测量,待测量值较稳定后(此时相位较稳定,变化不超过正负10度),先按“暂停”键暂停测量,此时机械振动值以非常微小,完成动平衡校正,点击退出完成。

图:二次平衡
下一页
上一页
下一页
-
服务热线:0512-55123135 E-Mail:wh@ks-Leadtech.com
传真:0512-55123136
公司地址:江苏省昆山市庆丰西路639号智谷创意产业园207-3
